Noise in the circuit processor
It was suggested that we separate the noise from the circuit processor. So I decided to first make it clear where does the noise play a role in our model and try to find a good way to define a noise object.
In the simulation, I find two places to introduce noise:
How should we define this perturbation in a separate noise object?
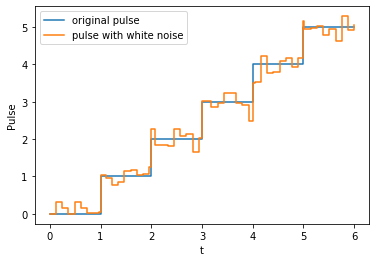
To represent the noise in the instruments, I'm thinking of a time-dependent experiment parameter (e.g. frequency, interaction strength etc). Like we now have for the amplitude, it would be a 2D array, where each row specifies one parameter for all the time slices. But in this way, it would be simply defined in the processor, not a separate object.
What kind of noise will it lead to?
I this the noises it leads to is also not completely new. If the experiment parameter is increased by a fixed value, we will get a detuned frequency, that's new. If we add random noise to those parameters like frequency, I would expect the behaviour to be the same as adding a collapse operator. So the second one is basically doing the same thing as collapse, just from a different perspective. However, this might be useful as a simulation.

In the simulation, I find two places to introduce noise:
- The first one is the collapse operator, it has been an important part of the open system solver from the beginning of QuTiP and can be naturally added into our simulation. the T1 and T2 time added recently is basically just a wrap for it.
- Noise from the instrument. Parameters like a detuned frequency can be simulated by simply perturbing it in the definition of cqed and spinchain
How should we define this perturbation in a separate noise object?
To represent the noise in the instruments, I'm thinking of a time-dependent experiment parameter (e.g. frequency, interaction strength etc). Like we now have for the amplitude, it would be a 2D array, where each row specifies one parameter for all the time slices. But in this way, it would be simply defined in the processor, not a separate object.
What kind of noise will it lead to?
I this the noises it leads to is also not completely new. If the experiment parameter is increased by a fixed value, we will get a detuned frequency, that's new. If we add random noise to those parameters like frequency, I would expect the behaviour to be the same as adding a collapse operator. So the second one is basically doing the same thing as collapse, just from a different perspective. However, this might be useful as a simulation.

Comments
Post a Comment